




Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.

As we all know, the solar panel has an IV curve, which represents the output performance of the solar panel, respectively representing the current and voltage values. The voltage and current indicated by the intersection of the two lines is the power of this solar panel. Disadvantageously, the IV curve will vary with irradiance, temperature and age. Irradiance is the density of radiation events on a given surface and is generally expressed in watts per square centimeter or square meter. If the solar panel does not have mechanical sunlight tracking capability, the irradiance will change about ± 23 degrees with the movement of the sun throughout the year. In addition, daily changes in the irradiance of the sun moving from the horizon to the horizon can cause the output power to change throughout the day. To this end, ON Semiconductor has developed a solar cell controller NCP1294, which is used to achieve maximum peak power point tracking (MPPT) of solar panels to charge batteries with the highest energy efficiency. This article will introduce some of the main functions of the device and the issues that need attention when applying.
Enhanced voltage mode PWM controller
NCP1294 is a fixed frequency voltage mode PWM feedforward controller that contains all the basic functions required for voltage mode operation. As a charge controller that supports different topologies such as buck, boost, buck-boost and flyback, NCP1294 is optimized for high-frequency primary-side control operation, has pulse-by-pulse current limiting and bidirectional synchronization, and supports the highest power Solar panels up to 140 W. The MPPT function provided by this device can locate the maximum power point and adjust it in real time according to environmental conditions to keep the controller close to the maximum power point, thereby extracting the maximum power from the solar panel and providing the best energy efficiency.
In addition, NCP1294 also has functions such as soft start, precise control of duty cycle limit, start current below 50 μA, overvoltage and undervoltage protection. In solar applications, NCP1294 can be used as a flexible solution for module-level power management (MLPM) solutions. The reference design based on NCP1294 has a maximum power point tracking error of less than 5% and can charge four batteries in series or parallel. Figure 1 is a block diagram of the NCP1294 120 W solar controller.
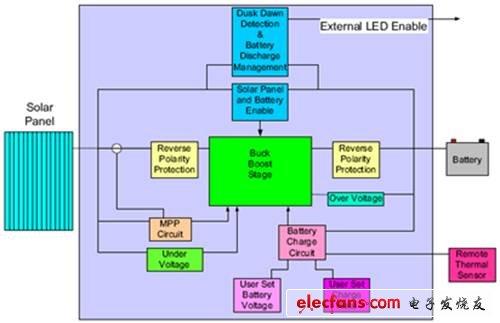
Figure 1: Block diagram of ON Semiconductor ’s NCP1294 120 W solar controller
As shown in Figure 1, the core of the system is the power section, which must withstand an input voltage of 12 V to 60 V and produce an output of 12 V to 36 V. Since the input voltage range covers the required output voltage, there must be a buck-boost topology to support the application. Designers can choose a variety of topologies: SEPIC, non-inverting buck-boost. Flyback, single-switch forward, double-switch forward, half-bridge, full-bridge, or other topologies.
Design work includes increasing the isolation topology based on power requirements. The management of battery charge status is completed by an appropriate charging algorithm. The solar panel installation technician can choose the output voltage and battery charging rate. Since the controller is connected to the solar panel, it must have maximum power point tracking, providing high value to the end customer. The controller has two positive enable circuits, one to detect the night time and the other to detect the battery's charge status, so that the external circuit will not cause the battery to discharge the damaged point. Since the controller will be installed by field technicians and novices with different degrees of experience, it is important that the input and output must have reverse polarity protection. In addition, the controller and battery may be installed in an overheated or cold location, the controller must use battery charging temperature compensation. The design should also include safety features, such as battery overvoltage detection and solar panel undervoltage detection.
Working principle of dynamic MPPT
In order to extract the maximum power from a variable power source (ie solar panel), the solar controller must use MPPT. MPPT must first find the maximum power point and adjust the environmental conditions in time to keep the controller close to the maximum power point. Dynamic MPPT is used when the system changes. Since each switching cycle is changing, the power drawn by the solar panel will also change significantly in each cycle. Dynamic MPPT uses the voltage dip of the solar panel multiplied by the current increased in each switching cycle to determine the error signal to be generated to adjust the duty cycle. The dynamic response can detect the slope of the IV curve to establish a power ramp, and a power representing the duty cycle from the intersection of the error signals. The cycle ends when the slope of the ramp changes from positive to negative, as shown in Figure 2.
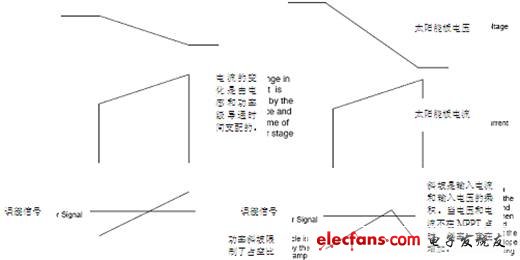
Figure 2: Voltage and current of the PWM regulator
Feedforward voltage mode control
In traditional voltage mode control, the ramp signal has a fixed rising and falling slope. The feedback signal comes only from the output voltage. Therefore, the voltage mode control circuit has a poor voltage stabilizing effect and has audio susceptibility. The feedforward voltage mode control is derived from the ramp signal input line. Therefore, the slope of the ramp varies with the input voltage. The feedforward function can also provide a volt-second clamp, which limits the maximum product of the input voltage and the on-time. Clamp circuits in the circuit, such as forward and flyback converters, can be used to prevent transformer saturation. NCP1294 Solar Charge Controller Application Design Flow
When choosing a solar controller topology, it is important to understand the basic operation of the converter and its limitations. The selected topology is a non-inverting four-switch non-synchronous buck-boost topology. The converter uses the control signal from NCP1294 to operate, Q1 and Q2 turn on at the same time to charge L1. The four-switch buck-boost topology is shown in Figure 3, where the inductor is used to control voltage and current.
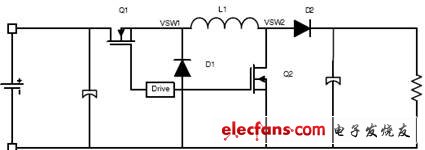
Figure 3: Four-switch buck-boost topology
The four-switch non-inverting buck-boost has two modes of operation, namely buck mode and buck-boost mode. In buck mode, the converter generates an input voltage pulse, which is LC filtered to produce a lower DC output voltage. The output voltage can be changed by modifying the on-time relative to the switching period or switching frequency.
If the output voltage may reach 1% to 89%, the solar controller operates in buck mode. If the output voltage cannot be reached due to the limitation of the duty cycle, it will switch to buck-boost mode, at which point the output voltage can be reached. The change from 89% to a lower duty cycle is shown in Figure 4.
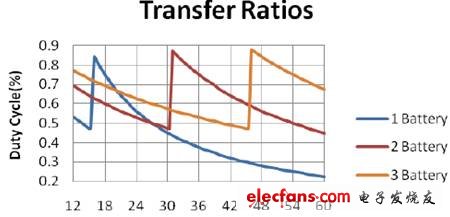
Figure 4: Transfer ratio between multiple battery buck and boost modes
It should be noted that when the converter mode is switched from buck to buck-boost, the error signal will take a while to change the duty cycle. The instantaneous change of mode will cause the buck-boost converter to try to switch at 89% duty cycle and try to switch to 47%; this will cause the converter to try to output 130 V in the trade over region. NCP1294 provides a pulse through the pulse current limiter, which can prevent the converter energy from reaching a dangerous level and achieve a gentle transition under the duty cycle condition.
Author:
Mr. Damon Ye
E-mail:

August 03, 2023
Envoyer à ce fournisseur
Author:
Mr. Damon Ye
E-mail:
August 03, 2023
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.